The World Is Not Enough Demonstrates The Future of Space Exploration
Steam power spacecraft collects fuel from planetary bodies
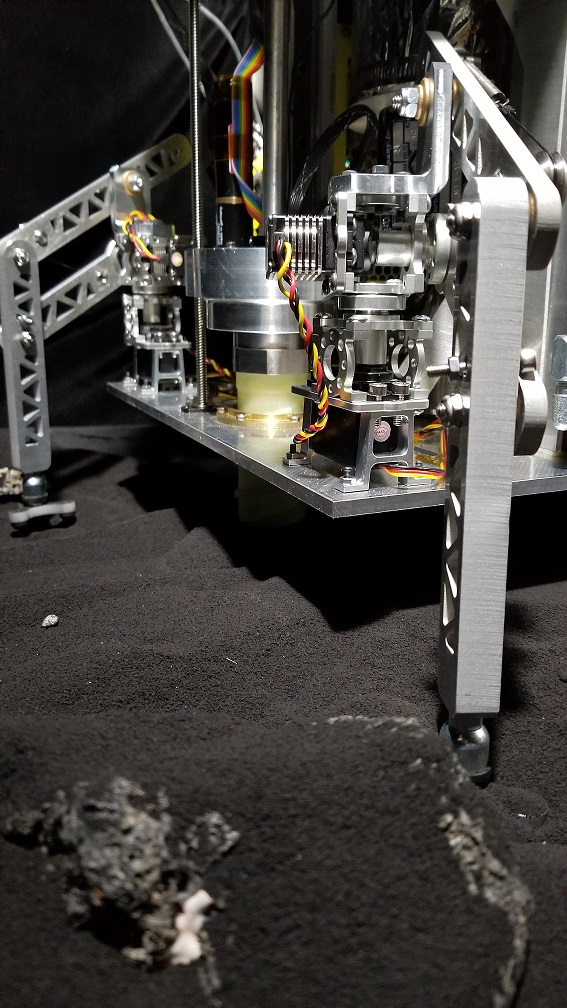
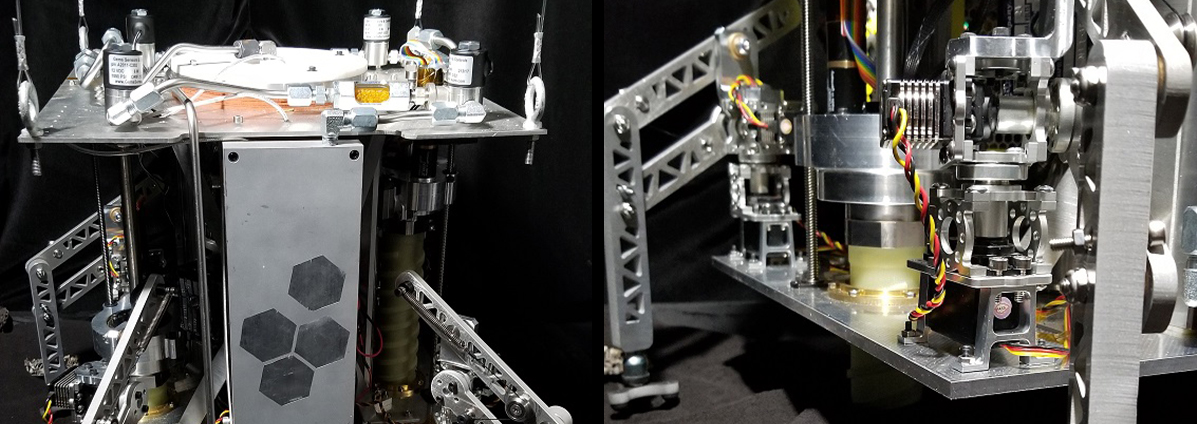
The World Is Not Enough (WINE) is a concept for a new generation of spacecraft that takes advantage of In-Situ Resource Utilization (ISRU) to explore space. WINE mines to extract water from planetary regolith, capturing the water as ice in a cold trap and heating it to create steam for propulsion. By propulsively “hopping” from location to location, WINE can explore Solar System bodies as well as individual bodies (e.g. WINE could cover much greater distances on Europa or the Moon than a rover, and can reach otherwise inaccessible regions). And by refueling itself as it goes, WINE’s range is not limited by consumables. This makes WINE particularly well suited to prospecting and reconnaissance missions.
This video shows a series of tests performed on a proof-of-concept WINE prototype vehicle at Honeybee Robotics. The vehicle demonstrates several of the primary operations that would be required of the WINE spacecraft including: mining and heating regolith to extract water; capturing water as ice in a cold trap; reorienting the vehicle to allow for further mining; pushing captured water into a propulsion tank; and heating propellant to create steam for thrust. All systems demonstrated are fully functional. All tests are conducted with regolith simulant in a vacuum chamber.
“The project has been a collaborative effort between NASA, academia and industry; and it has been a tremendous success,” says Kris Zacny, vice president of Honeybee Robotics. “The WINE-like spacecrafts have the potential to change how we explore the universe.”
“WINE provides an opportunity to gain insight into the many complexities associated with this type of self-sustaining mission. Technology development efforts like this are key in helping to refine requirements for realistic future mission proposals. I hope to see further maturation some of WINE’s key technologies through developments sparked by this demonstration.” said Zak Fitzgerald – lead engineer on the project.
The WINE prototype was developed by Honeybee Robotics in collaboration with University of Central Florida and Embry-Riddle Aeronautical University. The project was supported by the NASA STTR program.
See more press releases at:
https://today.ucf.edu/steam-powered-asteroid-hoppers-developed-ucf-collaboration/
https://phys.org/news/2019-01-steam-propelled-spacecraft-prototype-theoretically-explore.html
https://www.forbes.com/sites/brucedorminey/2019/01/14/steam-powered-asteroid-hopper-offers-revolutionary-new-way-to-explore-our-solar-system/#253d8268500b
https://www.cnet.com/news/steam-powered-spacecraft-backed-by-nasa-could-explore-asteroids/
https://www.popularmechanics.com/space/rockets/a25907376/honeybee-prototype-steam-spacecraft/
http://www.astronomy.com/news/2019/02/researchers-develop-a-steam-powered-spacecraft-that-can-hop-between-asteroids
https://www.news2nd.com/post/30066
https://www.nbcnews.com/mach/science/how-swarms-steam-powered-robots-could-map-solar-system-ncna965911